






圖片來源:視覺中國
從世界范圍來看,Waymo、優步(Uber)、Lyft、百度(Baidu)和梅賽德斯-奔馳(Mercedes-Benz)等廠商正逐步加大對無人駕駛的研發和量產力度,其關鍵性的就是在于雷達技術和應用上的突破。
而大部分企業更是瞄準了激光雷達這塊“香饃饃”,Yole Développement分析預計全球汽車激光雷達市場將在2023年達到50億美元,到2032年將達到280億美元。
作為無人駕駛的核心技術,激光雷達是一種集激光、全球定位系統(GPS)和IMU(Inertial Measurement Unit,慣性測量裝置)三種技術于一身的系統,用于獲得數據并生成精確的DEM(數字高程模型)。
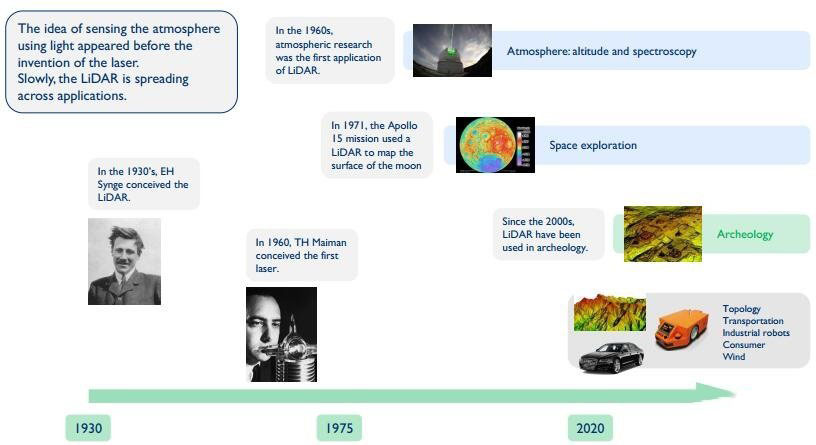
激光雷達發展歷程
在大多數參與自動駕駛玩家看來,激光雷達是實現自動駕駛的必要基礎,傳統雷達無法識別物體細節,而攝像機在暗光或逆光條件下識別效率明顯降低。
但是,市場的火熱發展也正讓激光雷達出現了一些不一樣的認知,飛速狂奔的激光雷達,也許已經“跑錯了道”。
弄錯了認知方向:體積大、價格高是激光雷達的“標配”
激光雷達應用于無人駕駛,要從Velodyne說起。早在2004年,美國國防部高級研究計劃署(DARPA)主辦了一場跨越莫哈韋沙漠的無人駕駛挑戰賽,這個比賽的初衷是刺激軍事和商業應用領域的自動駕駛技術研發。
Velodyne的創始人David Hall在此次比賽中敏銳的發現了激光雷達裝置在自動駕駛技術中的優勢,并開始著手研究。不久,Velodyne研發出了第一臺激光雷達,其直徑達到30英寸,重量接近100磅。
時至2010年,谷歌推出無人駕駛汽車項目。谷歌車頂所使用的“車頂花盆”就是Velodyne 生產的64線激光雷達傳感器,成本約為7.5萬美元,其成本占到一輛谷歌無人車近一半。

谷歌無人車的“車頂花盆”
而這個“車頂花盆”,并不招人待見。
一個明顯的問題就如無人駕駛測試車的外觀,激光雷達體積較大,安裝在測試車上相當笨重,因此Alphabet子公司Waymo的測試車采用了黑色巨大弧形車頂,而豐田和優步的測試車頂上則像頂了個咖啡罐。
長此以往,廠商開始認為,體積大、價格昂貴,是目前激光雷達的“標配”。
但是,一批研發機構已經開始著手解決這個“痛點”,2015年Velodyne發布16線激光雷達,價格從7.5萬美元的降至8000美元;2018年3月,Cepton公司推出第四代產品Vista,其是目前市場中功耗最低,體積最小的傳感器,且價格低于1000美金。

低于1000美元的“Vista”激光雷達
與機械激光雷達(如Velodyne)、固態激光雷達(如Quanergy)和flash激光雷達(如LeddarTech)不同,Cepton采用微動技術(MMT),并與日本某一級供應商進行合作,將激光雷達應用于車燈的空箱之中,進一步拓展激光雷達的應用領域。
搞錯了應用場景:只有無人駕駛激光雷達才能“大展拳腳”
激光雷達在現階段智能車輛實現中是不可或缺的傳感器,它具備精確的測距、空間定位與描述、可靠的障礙物檢測等獨特能力。
通過高分辨率激光雷達,有助于實現復雜交通環境下自主駕駛,特別是針對交通擁堵、狹窄道路、小區和停車場等特殊場景。
激光雷達在無人駕駛中占盡了風頭,讓許多廠商和消費者們開始認為只有無人駕駛才能讓激光雷達“大展拳腳”。誠然,事實證明激光雷達之于無人駕駛就如水之于魚,有著不可替代性,但是也要看到,激光雷達的應用場景不僅局限于無人駕駛領域。
要滌蕩這種認知,首先要明白激光雷達的工作原理。所謂激光雷達,就是通過使用光來測量距離,激光雷達能夠非常快速地采集樣點——每秒高達150萬個數據點。
想象一下,當發出光脈沖時啟動秒表,然后當光脈沖(從遇到的第一個物體反射出來)返回時停止計時器;通過測量激光的“飛行時間”,并且知道脈沖行進的速度,就可以計算距離。
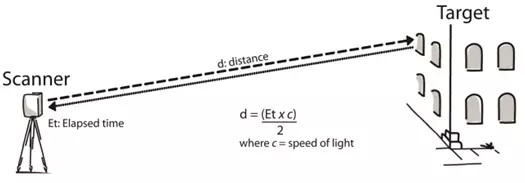
激光雷達的應用原理
傳感器通過快速的對整個環境進行采樣,可以形成一個完整的點云,而此種運作方式在許多領域都將大有可為。比如:
應用于機器人領域,激光雷達解決了機器人行走的問題,知道如何路徑規劃,以及避障的功能,如鐳神智能、波士頓動力公司都在此方面進行了嘗試并有產品產出;
在無人機測繪領域,激光雷達可以對正在作業中的礦山和施工現場做精確的三維建模;
比如Cepton的SORA200產品,重僅僅550克,探測距離達到200米,專門提供無人機測繪解決方案;
在鐵路領域,激光雷達可以測量車輛,并可在中央車頂配備慣性測量單元(IMU)和 GPS天線,用以獲得軌道沿線經緯度信息的3D數據。

Cepton SORA200 應用于無人機上
再談汽車駕駛領域,除了無人駕駛中激光雷達作為汽車的“眼睛”可以實現路障識別外,其還可以應用于自動緊急制動(AEB)系統,采用雷達測出與前車或者障礙物的距離,然后利用數據分析模塊將測出的距離與警報距離、安全距離進行比較,從而保障人為駕駛的安全性。
此外,在汽車零配件領域,與機械激光雷達(如Velodyne)、固態激光雷達(如Quanergy)和flash激光雷達(如LeddarTech)不同,Cepton采用微動技術(MMT),并與日本某一級供應商進行合作,將激光雷達應用于車燈的空箱之中,進一步拓展激光雷達的應用領域。
辨錯了配件關系:激光雷達可取代其他冗余
激光雷達、雷達與攝像頭之間,永遠都不會是取代與被取代的關系。
特斯拉CEO伊隆·馬斯克(Elon Musk)曾認為:他可以在不依靠一項技術的情況下打造出自動駕駛汽車和半自動駕駛汽車。該技術就是激光雷達(LiDAR),即使用激光來幫助汽車繪圖和穿梭于周圍的環境。
馬斯克認為,其可以依靠攝像頭和雷達——在不使用激光雷達的情況下——來完成自動駕駛系統所需的大部分工作。
這也是目前一些廠商對于激光雷達的看法:過于冗余。事實真正的如此嗎?實際上,激光雷達傳感器可帶來冗余和重疊的功能,這是打造無人駕駛汽車所需要的東西,讓車輛即便面對最具挑戰性的環境,也能夠應對。
目前來說,無人駕駛所必備的三種設備:攝像頭、激光雷達和雷達,他們各自有著自己的優點。
例如,攝像頭能夠識別物體,但在某些黑暗和低光照的條件下很難看清物體。而激光雷達則能夠從一個物體上反射激光,進而形成一個圖像,即使雨雪可能限制其有效性,也可能會避免照明問題。
這些優點和缺點,雖然每種技術都提供一定程度的冗余,但從安全性的角度來說必須存在的。無人駕駛當前最為人所詬病的就是安全性問題,比如Uber今年3月18日發生的無人駕駛首例致死車禍,其原因在于無人車傳感器已經探測到這位正在橫穿馬路的行人,但自動駕駛軟件沒有在當下采取避讓措施。
作為傳感器本身來說,多類型多渠道的傳感器能夠形成聯動效應,進而一定程度上增加無人駕駛的安全性。畢竟,只要有0.01%的風險,就會有人因此付出生命的代價。
同樣,從另一個角度來看,馬斯克不看好激光雷達也是因為特斯拉正試圖以最低的成本來開發自動駕駛汽車,以低成本并專注軟件的方式來替代激光雷達的高昂價格。
但實際上,隨著技術的完善性和發展,激光雷達的價格正在逐步下降。Otto公司使得激光雷達技術較數年前不僅功能大幅提升同時成本下降了近九成,其產品主要用于18輪的大型貨運掛車上。
而Cepton公司在保證性能的基礎上,更是承諾將Vista的售價降至200美元以下,并已經投入量產。
狂奔的激光雷達,該走向何方?
激光雷達發展至今,市場已經是一片紅海,如何能夠在激烈的競爭中展現出自身優勢,狂奔的激光雷達,又該走向何方呢?
其實,激光雷達發展中面臨著更多的機遇與挑戰,比如材質、環境、行駛速度和成本依然是激光雷達需要攻堅的難題,與此同時,其也面臨著許多的機遇。
比如,其在智能機器生態系統中就將大有可為。與使用二維圖像相比,點云能夠更容易的被計算機使用,用于構建物理環境的三維形象——二維圖像是人腦最容易理解的數據,而對于計算機來說,點云是最容易理解的。
再如,智能激光雷達能為無人駕駛“安全護航”。
比如Cepton所研制的微動技術(MMT),其可以實現傳感器無任何旋轉或摩擦部件,從而將雷達深度集成與車身之中,提高產品的安全性。在自動駕駛、主動安全和高精度地圖方面,Vista提供了很好的解決方案。
總的來說,激光雷達是實現無人駕駛的重要傳感器,由于其功能特性可以在復雜交通環境的感知中起到關鍵作用,越來越受高度重視。
當然,激光雷達在應用市場的過程中也存在著一些機遇和挑戰,具體激光雷達這條路怎么“走得好、走得穩”,這還需要市場和時間來檢驗。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

