






科技的發展為人們在生活中帶來許多的便利,現在人們只需要在導航設備上輸入目標地點,系統就會一步一步把駕駛員帶到目的地,同時提供行程距離、所需時間和路面狀況等詳細駕駛信息。而這一切都必須依賴一張強大而精確的地圖作為支持。現代城市急速發展, 高樓大廈密集,道路縱橫交錯, 如何高效益低成本地制作精確的地圖便成為業界一個重大的挑戰。
LiDAR工作原理
車載LiDAR,簡稱光達,是一種光學遙感技術,它通過向目標發射一束光,通常是一束脈沖激光來測量目標的距離等參數,是測繪行業目前最先進的技術之一,或許大家曾經都在路上遇到過地圖制作團隊的車輛在大街小巷里穿梭以采集數據。
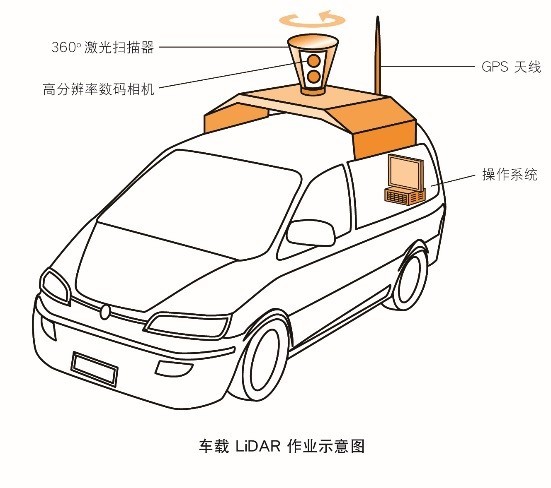
車載LiDAR作業示意圖
車載LiDAR系統主要由激光掃描儀、POS(定位定向系統,包括GPS和IMU)和測速計等組成。其中激光掃描儀采用二維激光掃描,獲取360度內掃描到的物體的坐標點,通過車輛前進獲取車輛行駛路線兩側的三維數據。
車載LiDAR系統配置
從測量的原理來說,車載LiDAR主要采用測角和測距兩種方法,前者根據設置參數,借助掃描儀的勻速掃描得到每個脈沖在掃描儀坐標系下的角度,后者則根據激光脈沖發射返回時間差計算掃描中心到被測點的距離。通過角度和距離求得測區內物體在掃描儀坐標系下的坐標點;通過實時POS數據經過坐標轉換得到物體的地理坐標點。得到的數據即稱為“點云”數據,配合數碼相機獲取的對應影像數據,最后經過后期點云和影像融合便可生成三維街道實景。同時采用測角和測距兩種方法的優點是工作效率得到大幅提升,因為如果單獨采用測距的方法,激光需要到達每一個未知點。
車載LiDAR
光柵系統在LiDAR上的應用
光柵在掃描儀上主要應用于測角部分,用以反饋每個發出的脈沖在掃描儀坐標系下的角度,再與測距數據組合進行計算。 典型掃描儀一般設計共有平行和垂直兩個旋轉軸,兩軸均采用伺服電機,分別配置圓光柵系統作位置反饋,激光源通過兩組以伺服電機帶動且勻速旋轉的棱鏡,并以固定的脈沖發射間隔發射到被測物體進行掃描,從而收集三維空間數據。光柵在整個系統中的作用可說是至關重要,如果反饋角度數據偏差,對應的角度值就會出現錯誤,從而導致系統生成扭曲的圖像。目前市場上的車載掃描儀最大測距范圍可達道路兩旁1000 m或以上,測角的分辨率和精度普遍也能達到0.001度和0.005度,另外測距精度可達每100 m誤差僅 10 mm以內。”
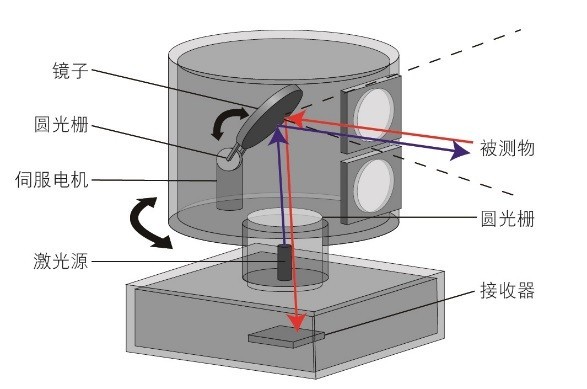
掃描儀工作原理
零部件微形化
車載掃描儀在工作時被安裝在車頂上,因此無論是體積或是重量都是使用者在購買時必定會考慮的因素。目前廠家開發的激光掃瞄器都是往測距遠、精度高、體積小且重量輕的方向發展。這意味著掃描儀的機構設計以及其他零部件的體積和重量都必須緊湊輕巧。 由于掃描儀機構設計緊湊的原因,產品內部基本沒有多余的空間,故對零件的體積有嚴格的要求. 雷尼紹ATOM圓光柵的微型設計,微形讀數頭和分離式玻璃碼盤的設計使客戶在機構設計上有更大的自由度. 對于部份對精度要求更高的客戶,雷尼紹可提供規格更高的TONiC系列產品,配置RESM圓光柵。另外,開放式光柵是LiDAR必然的選擇,原因是封閉式光柵體積相對較大。另一方面,雖然光柵安裝在機箱內,但長時間在戶外工作難免受灰塵等污染物的影響。封閉式光柵的抗污能力確實比開放式光柵優異,不過雷尼紹的開放式光柵在同類型產品中確實做得十分出眾。
雷尼紹ATOM圓光柵系列讀數頭最小尺寸僅6.8 mm x 20.5 mm x 12.7 mm,與玻璃碼盤搭配使用。ATOM光柵采用獨有的光學濾波系統,可提供更好的信號穩定性和純粹度,同時消除柵尺因安裝在彎曲或高低不平的表面上而出現的波動誤差,此外,TONiC也正是采用了這種先進的光學濾波系統。

雷尼紹ATOM系列圓光柵
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

