





這個有趣的項目是從2011年開始的,研究團隊由Thomas Schmickl博士帶領,并得到了歐洲研究委員會的資助。正如Schmickl在該項目的網站上介紹的那樣,COCORO與其他群體項目的不同之處在于將集體認知能力賦予機器人所牽涉到的復雜性。“它們作為一個集體系統中的獨立因子,可從過去的經驗和周圍的環境中學習。”他寫道。據了解,在研究中,這些機器魚可以勝任交換環境信息、探索水下環境、甚至維護和收獲資源等任務。就像魚一樣,它們可以單獨行動,也可以集體行動。
“我們專注于群體機器人,這些機器人可以通過個體學習,但是它們更為突出的是整個群體的學習能力。”這位熱情的項目領導者告訴記者,“在這種背景下,即使是單獨的非學習機器人也可以獲得集體認知,比如,改變群體的拓撲結構。雖然這一技術已經在陸上機器人那里實現過幾次。但就我們所知,我們是第一家將這種技術用在水下自主機器人身上的研究團隊。”
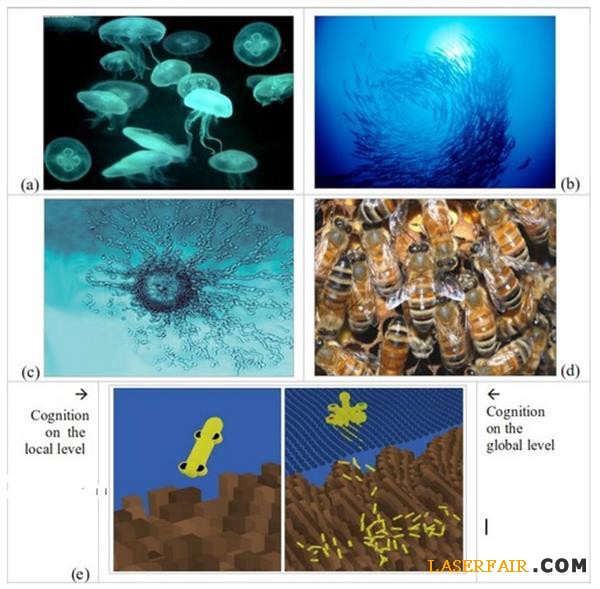
該研究團隊在其項目的主頁上宣稱,這群機器魚能夠在各種變化甚至危險的環境下保持群體的完整性。“我們是讓這些水下機器人通過互相交流信息進行交互,從而產生一個能夠了解周邊環境、了解本地個體級目標和威脅、甚至包括全球群體層面的目標和威脅的感知系統。”他們寫道。“用過自組織機制將局部行動和全球行動相結合,信息從全球層面流入本地層面,從而影響到每個水下機器人個體的行為。這種基于感知的模式使得整個集體系統能夠獲得非常快的反應能力。就像我們看到的那種天然的魚群那樣,這種系統十分靈活,而且是可擴展的。
從研究團隊發布的視頻片斷我們可以看到,它們如何在游泳池里執行搜索任務。當群體成員之一發現目標之后,它會通過一系列用于通信的LED燈警告其它成員。不久后,所有的機器魚都“學習”到了這一信息。“它們更近似于一個魚群版的可移動傳感器網絡和信息處理網絡。”Schmickl解釋說。
據Schmickl介紹,他們在開發過程中是以蜜蜂和魚類的行為、甚至包括變形蟲的通信模式為藍本設計的算法。由于科學家們還在不停地改進,這些機器人的大部分部件都是3D打印的,這樣他們迭代起來十分方便。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



























 關注我們
關注我們

