




1引言
風能是可再生能源中發展最快的清潔能源,也是最具有大規模開發和商業化發展前景的發電方式。我國風能資源儲量豐富,發展風能對于改善能源結構緩解能源短缺具有重大現實意義。近年來,我國風電產業規模逐步擴大,風電已成為能源發展的重要領域。
在風電技術發展方面,風力發電機單機容量朝著大型化發展,兆瓦級風力機已經成為了國際風力發電市場的主流產品。目前大型風力發電機組普遍采用變槳距控制技術,例如,VESTAS的V66-1.65MW、V80-2MW,ENERCON的E-66-1.8MW、E-58-1MW, GE的1.5MW、2.5MW、3.6MW機組,REPOWER的MD77-1.6 MW、MM82 -2MW,NORDEX的S77/1.5MW等都采用變槳距系統。
變槳距調節是沿槳葉的縱軸旋轉葉片,控制風輪的能量吸收,保持一定的輸出功率。變槳距控制的優點是能夠確保高風速段的額定功率,額定功率點以上輸出平穩、在額定點具有較高的風能利用系數、提高風力機組起動性能與制動性能、提高風機的整體柔性度、減小整機和槳葉的受力狀況。因此國際風力發電市場的主流產品是變速變槳距機組。
世界上大型風電機組變槳距系統的執行機構主要有兩種,液壓變槳距執行機構和電動變槳距執行機構。其中,電動變槳距系統的槳距控制通過電動機來實現,結構緊湊、控制靈活、可靠,正越來越受到大多數整機廠家的青睞,市場前景十分廣闊。
目前,我國MW級變速恒頻風電機組電動變槳距系統產品一直依賴進口,國外比較有代表性的有德國LUST、SSB、美國GE 公司的產品。其高昂的產品價格、技術服務的不足和對關鍵技術的封鎖嚴重影響了我國風電產業的健康快速發展。風力發電機向著大型化的方向發展,變槳距控制技術已經成為風力發電的關鍵技術之一,研制電動變槳距系統實現大型風力機電動變槳距控制技術國產化、產業化的要求十分迫切。因此,掌握電動變槳距控制技術將改變國外公司對變槳距控制技術壟斷的現狀,提高我國風電關鍵技術的研制能力,降低風力發電的成本;對加快擁有自主知識產權的風電設備研制,大力發展風電事業具有重要意義,從而使我國在該領域的研究達到國際先進水平。
變速變槳風力發電機組是風力發電技術發展的主流方向,控制系統是機組的關鍵部件之一。控制系統的性能優劣對風機運行的效率和使用壽命有至關重要的影響。20世紀90年代,國外便開始了對變速風力機的運行特性和控制策略的研究,并取得了一系列的成果,生產制造出成熟可靠的商業化運營的控制系統產品。目前的研究熱點集中在基于現代控制理論的新型控制算法在風力發電控制系統中的應用上,以期進一步提高風力機的運行效率,減小疲勞載荷,改善輸出電能質量。我國風電產業起步較晚,目前對變速風電機組的運行特性及規律缺乏深入研究,在控制系統的產業化項目中,缺乏最優的控制策略依據。深入研究風電機組及風力機的運行特性和規律對于控制系統的分析與設計具有十分重要的指導意義。
最大風能捕獲是控制系統的重要功能之一,它直接影響的風力發電機組的運行效率。對于提高風電機組的發電量,減小風電成本具有重要意義。而傳統的控制方法存在諸多不足,引起較大的能量損失,新型控制算法的研究和應用,可以有效提高風能利用效率,實現最大風能捕獲。
為了獲得足夠的起在變槳距系統中需要具有高可靠性的控制器,本文中采用了羅克韋爾 SLC 500系列可編程控制器(PLC)作為變槳距系統的控制器,并設計了PLC軟件程序,在國外某知名風電公司風力發電機組上作了實驗。
2變槳距風電機組及其控制策略
變槳距調節是沿槳葉的縱軸旋轉葉片,控制風輪的能量吸收,保持一定的輸出功率。如圖1所示為變槳距風力發電機的原理圖。變槳距控制的優點是機組起動性能好,輸出功率穩定,停機安全等;其缺點是增加了變槳距裝置,控制復雜。
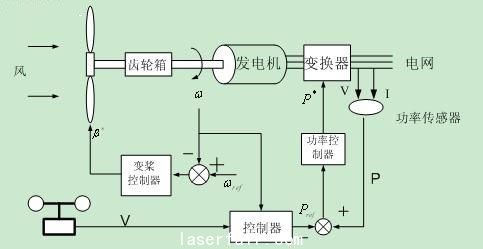
圖1 變槳距風電機組原理圖
在風力機設計的初期,設計人員就考慮到了變槳距控制,但是由于對空氣動力學特性和風力機運行工況認識不足,控制技術還不成熟,風力機的變槳距機構可靠性不能滿足運行要求,經常出現飛車現象。直到20世紀90年代變槳距風力機才得到廣泛的應用。目前大型風力發電機組普遍采用變槳距控制技術,例如, VESTAS的V66-1.65MW、V80-2MW,ENERCON的E-66-1.8MW、E-58-1MW,ENRON Wind的1.5S-5MW,NORDEX的S77/1500KW等都采用變槳距結構。
定槳距控制,風力機的功率調節完全依靠葉片結構設計發生失速效應使高風速時功率不增大,但由于失速點的設計,很難保證風力機在失速后能維持輸出額定功率,所以一般失速后功率小于額定功率[1][4];而變槳距風力機可以根據風速的大小調節氣流對葉片的功角,當風速超過額定風速時,輸出功率可以穩定在額定功率上。如圖2所示為定槳距風力機和變槳距風力機的輸出功率比較曲線。在出現臺風的時,可以使葉片處于順槳,使整個風力機的受力情況大為改善,可以避免大風損害風力機組。在緊急停機或有故障時,變槳距機構可以使葉片迅速順槳到90°,風輪速度降低,減小風力機負載的沖擊,延長風電機組的使用壽命。
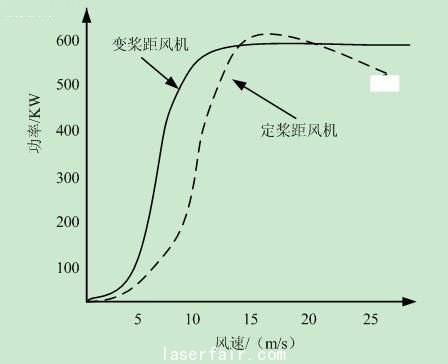
圖2 變槳距和定槳距風力機的功率曲線
變槳距控制技術關系到風力發電機組的安全可靠運行,影響風力機的使用壽命。隨著變槳距風力機的廣泛應用,許多學者和研究人員投入了變槳距控制技術及變槳距風力機結構的研究。目前人們主要致力于通過控制槳距角使輸出功率平穩、減小轉矩振蕩、減小機艙振蕩等技術的研究。Vestas公司推出了OpiTip(最佳槳距角)風力發電機組,不但優化了輸出功率,而且有效的降低的噪音。
目前變槳機構有兩種:一種是液壓變槳距執行機構;另一種是電動變槳距執行機構。液壓變槳控制機構具有傳動力矩大、重量輕、剛度大、定位精確、執行機構動態響應速度快等優點,能夠保證更加快速、準確地把葉片調節至預定節距。目前國外著名大公司如丹麥VESTAS的V80-2.0MW風機等都采用液壓變槳機構[5][6]。電機變槳執行機構是利用電機對槳葉進行控制,電動變槳沒有液壓變槳機構那么復雜,也不存在非線性、漏油、卡塞等現象發生,因此目前受到了許多廠家的關注。如REPOWER的XD77、MM92、GE公司生產的兆瓦級風力發電機就采用了電動變槳距機構。
如圖3所示為液壓變槳距執行機構原理圖,槳葉通過機械連桿機構與液壓缸相連接,節距角的變化同液壓缸位移成正比。當液壓缸活塞桿向左移動#p#分頁標題#e#到最大位置時,節距角為90°,而活塞桿向右移動最大位置時,節距角一般為-5°。液壓缸的位移由電液比例閥進行精確控制。在負載變化不大的情況下,電液比例方向閥的輸入電壓與液壓缸的速度成正比,為進行精確的液壓缸位置控制,必須引入液壓缸位置檢測與反饋控制。
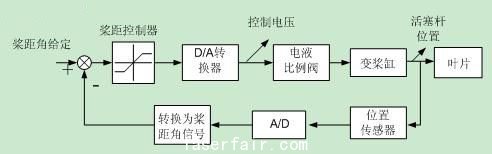
圖3 液壓變槳機構框圖
電機變槳距控制機構可對每個槳葉采用一個伺服電機進行單獨調節,如圖4所示。伺服電機通過主動齒輪與槳葉輪毅內齒圈相嚙合,直接對槳葉的節距角進行控制。位移傳感器采集槳葉節距角的變化與電機形成閉環PID負反饋控制。在系統出現故障,控制電源斷電時,槳葉控制電機由UPS供電,將槳葉調節為順槳位置。
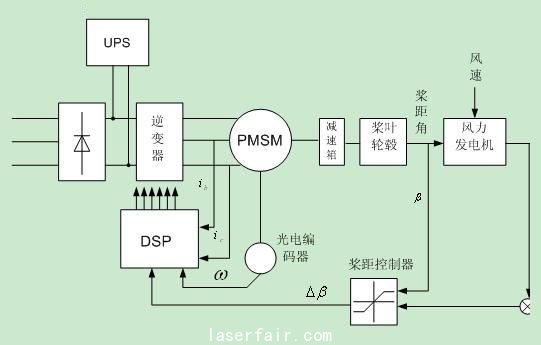
圖4 電動變槳距系統原理圖
隨著風力發電機技術的不斷進步,風力機已經朝著大型化方向發展。兆瓦級風力機已經成為市場上的主流機型,在國外的海上風電場廣泛采用2-5MW風力發電機組。目前的變槳距風力機大多采用三個槳葉統一控制的方式,即三個槳葉變換是一致的。但由于現代大型風力機葉片比較大,一般幾十米甚至上百米,所以整個風輪掃過面上的風速并不均勻,由此會產生葉片的扭矩波動并影響到風力機傳動機構的機械應力及疲勞壽命;此外,由于葉片尺寸較大,每個葉片有十幾噸甚至幾十噸重,葉片在運行的不同位置受力狀況也是不一樣的,故葉片重力對風輪力矩的影響也是不能忽略的。顯然對三個葉片進行獨立控制更加合理。通過獨立變槳控制,可以大大減小風力機葉片負載的波動及轉矩的波動,進而減小了傳動機構和齒輪箱的疲勞度以及塔架的振動,而輸出功率能基本恒定在額定功率附近。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



























 關注我們
關注我們

