






激光視覺技術起始于20世紀80年代,隨著該技術的逐漸成熟,已開發出許多附加功能,如基于接頭幾何形狀的自適應控制等。同時該技術應用廣泛,尤其在焊管行業,如TIG焊管、直縫埋弧焊管和螺旋焊管等。
基本原理
激光視覺系統普遍應用三角結構光測量法來獲得工件表面的三維信息。三角測量法本身是一個古老的技術,在第二次世界大戰中曾用來控制轟炸機投彈精度。激光視覺技術采用激光作為結構光源,激光器同攝像機(CCD或者CMOS)成特定的角度,兩者置于緊湊的傳感器內 部。使用時,激光器京柱面鏡投射激光條紋到工件/接頭的表面,攝像機獲取到激光條紋的圖像,通過三角測量的矩陣換算以及圖像處理和特征進行識別,從而獲取 到焊接接頭的三維信息。該信息隨后可以被用于焊接過程的控制。如果用于焊縫跟蹤,系統提取出接頭相對于焊槍位置的偏差數據,然后調節控制機器人或者焊接專 機焊槍的運動。
在焊管行業的應用
采用激光視覺系統對焊縫進行跟蹤和過程控制的技術已經在焊管行業得到廣泛的應用。在過去的15年間,數百套系統已安裝在簡單的TIG焊管焊槍導引、螺旋焊管過程控制以及海面厚壁管道的多焊槍多層多道全自動焊接生產中。
1. TIG焊管
圖1展示了TIG焊管焊接過程中的焊接機頭部分。激光視覺傳感器安裝在距離焊槍前面很短的距離處,注意觀察管材合攏的邊緣處形成的間隙,間隙中間位置應是焊槍的理想位置,傳感器探測到當前焊槍位置同其基準位置之間的偏差,并控制執行機構(十字滑架)移動焊槍到當前的焊縫位置處,從而保證焊槍始終處于焊縫的中心位置。TIG焊管的焊接速度可以達到5~10m/min。通過激光傳感器每秒50次的運算和處理,激光視覺系統可以很容易適應這樣高的焊接速度。
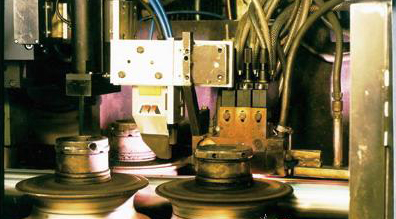
圖1 TIG焊管激光自動跟蹤系統
在TIG焊管中應用激光視覺系統能夠提高生產率和焊縫質量。管子成形前形成焊縫之處的間隙經常會相對焊槍產生連續波動。如果不采用焊縫自動跟蹤系統,就 需要操作者監視焊槍相對于焊縫的位置,如果產生偏差,操作者必須加以調整。采用激光視覺系統,操作者就不需再監視該過程。另一個好處在于激光跟蹤系統以 50Hz的頻率和0.1mm的精度檢測并控制焊槍相對于焊縫的位置,提高了焊接質量,降低了廢品率,同時也提高了生產率。在國內大連近江不銹鋼有限公司已 經得到應用,同時在浙江久立的等離子焊管中也得到應用。目前國內的激光焊管中也應用了類似的系統。
2. 直縫和螺旋埋弧焊管
對于大直徑的管道,通常采用兩種方法生產:直縫焊管以及螺旋焊管。
直縫焊管通過板材卷制成形,在最后成形之前,通過點固焊之后,采用雙絲埋弧焊接內縫(ID)和外縫(OD),產品用作油氣管道。
激光焊縫跟蹤系統可以用于上述三個過程,即點固焊、內焊和外焊。因為UOE點固通常采用明弧,電流高達2000A,焊接速度高達10m/min,明弧大 電流會產生的強烈弧光、煙塵和飛濺,其工作環境非常惡劣,UOE點固系統上采用激光跟蹤系統是一個挑戰。通過采用激光視覺傳感器就可以濾除所有的電弧光和 飛濺輻射。
接觸式焊縫跟蹤設備對于焊接飛濺非常敏感,需要經常維護,而激光跟蹤傳感器維護工作量很小,只需要定期清理和更換保護塑料 片。激光焊縫跟蹤系統目前已經成功地取代了點固焊機上的接觸式焊縫跟蹤設備ID和OD焊接系統焊接環境相對整潔,該焊接過程是產品生產的最后階段,該過程 必須非常可靠,盡可能降低廢品率。圖2展示了UOE直縫的焊接(OD)激光自動跟蹤系統。
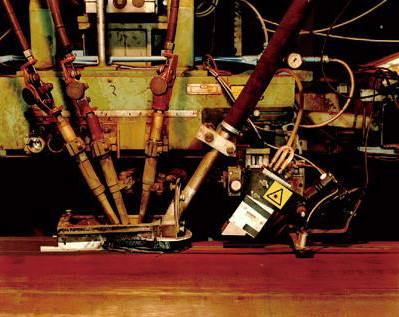
圖2 直縫埋弧焊管的激光焊縫跟蹤
螺旋焊管主要用于油氣管道、水管以及樁管。與直縫焊管不同,螺旋焊管為連續生產,這就意味著激光跟蹤系統能夠連續長時間穩定可靠的工作。圖3給出了 寶雞石油鋼管有限公司的螺旋焊管激光焊縫自動跟蹤系統。迄今為止,國內的寶雞鋼管廠、中原焊管、中石油管道局鋼管廠、金州管道、寶世威鋼管廠都應用了類似 的激光焊縫跟蹤系統。
焊管行業激光視覺系統的新應用
在焊管行業,激光視覺技術已經應用新的生產領域,包括ERW焊管的在線錯邊監測、螺旋焊管中成形角自動控制、螺旋焊管和直縫焊管離線及在線超聲探傷焊道跟蹤系統。
1. ERW焊管在線錯邊檢測
電阻焊管(ERW)不需要焊縫跟蹤系統,因為焊接熱源不是傳統弧焊那樣的點熱源。但激光視覺系統可以實時測量焊接接頭的錯邊量,在ERW焊接過程中仍然 起到重要的作用。由于ERW方法本身的原因,需要在焊后在線進行機械刨削,如果焊縫在被焊之前的遞送邊沒有對齊(有錯邊),隨著焊后的刨削過程,管子的壁 厚將被減薄。該問題如未被及時發現,最終用戶將會拒絕收貨或者會在使用過程中失效。
一種解決方案是將激光視覺系統安裝在焊接機頭和刨刀之間,視覺傳感器投射一條激光條紋到焊接接頭上,來測量接頭兩側管子的錯邊量,并將焊縫的位置和角度考慮進去。如果錯邊量超差,則會給出警告信號。
該系統在ERW應用的挑戰之一是其惡劣的生產環境,例如傳感器附近存在高溫、冷卻液、煙塵、以及刨削的飛屑等。解決該問題的最好辦法是設計一個安裝高度較高(至少100mm)的傳感器。
2. 螺旋焊管的成型角自動控制
激光焊縫跟蹤系統在螺旋焊管的內外焊中已經得到成功應用。目前開發的系統不但能夠執行焊縫跟蹤功能,而且能夠在焊接過程中進行高級控制。
通常螺旋焊管焊接過程中需要控制成型角,成型角對管道的直徑以及管材成形非常重要。操作者在手動調整過程中,需要觀察間隙(附近有埋弧焊焊劑)進行調整,而控制成型角的液壓機構反應較慢,使得成型角控制難度較大,很大程度上依賴于人的主觀判斷。
成型角自動控制的關鍵在于能夠準確穩定的測量接頭處的間隙,新一代激光視覺傳感器能夠投射三條激光條紋,并具有很高的精度。由于螺旋焊管采用埋弧焊接方 法,傳感器安裝在焊接接頭處焊劑之前,通過測量接頭處的幾點間隙,來獲得成型角度。目前該系統已經在印度管道行業得到成功應用。
3. 超聲探傷(UT)的激光自動導引
激光焊縫跟蹤系統同樣也應用在超聲自動探傷探頭的自動導引中。通過螺旋焊管和直縫焊管生產的焊縫,通常需要100%的超聲探傷。在螺旋焊管中,超聲探傷可以集成到螺旋焊管生產線中在線探傷,或者在管道切割后離線探傷。#p#分頁標題#e#
對超聲探傷進行自動跟蹤的難點在于埋弧焊接所形成焊縫幾何特征的精確定義和測量。通常在離線探傷中,要求探傷速度較快,因此對跟蹤系統的性能要求較高。我們設計的新一代三條紋激光傳感器和相應的軟件,能夠可靠的跟蹤這些焊縫,并且已經在印度和歐洲得到成功應用。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

