




4 機器人誤差模型(Roboterrormodel)
4.1 誤差補償方法
在進行機器人誤差補償及標定時,首先要考慮機器人的精度問題。在示教再現作業方式下,操作者移動機器人末端執行器到指定位置,然后通過機器人控制器記錄下此時末端執行器的位姿,通常就是電機的碼盤值。然后,機器人可以“再現”已經記錄的運動方式和編程順序。在這種編程方式下,機器人的重復精度是主要的特性參數,現在大多數商品化工業機器人都是以這種方式工作,其重復精度在整個工作空間上都可以達到毫米數量級。因此,就精度問題來說,示教再現方式可以使機器人很好的工作。而對于激光加工機器人來說,它的工作方式不是采用示教再現方式,而是采用離線編程方式,這時機器人的絕對精度成為關鍵指標。一般而言,機器人的絕對精度要比重復精度低一到兩個數量級,在如此低的精度下,機器人是無論如何也不能滿足工作需要。造成這種情況的原因主要是機器人控制器根據機器人的運動學模型來確定機器人末端執行器的位置,而這個理論上的模型與實際機器人的物理模型存在一定誤差。因此,對機器人運動學模型進行誤差補償進而提高機器人的絕對精度是目前機器人技術領域急需解決的問題。
一般情況下,機器人誤差分為幾何誤差和非幾何誤差。其中幾何誤差包括桿件參數誤差,理論參考坐標系與實際基準坐標系的誤差、關節軸線的不平行度、零位偏差等;非幾何因素包括關節和連桿的彈性形變、齒輪間隙、齒輪傳動誤差、熱形變等。如果對機器人的幾何誤差進行了很好的補償,絕對精度就可以大大提高,只有對于特定的需要提高絕對精度的應用時才考慮進行非幾何誤差的補償。
要提高機器人的絕對精度,可以從兩方面入手,一是采用“避免”誤差的方法,即針對產生機器人誤差的各種誤差源,采用高精密加工手段加工機器人各零部件,結合高精密裝配技術進行裝配。二是采用綜合補償技術,即采用現代的測量手段,對所測得的數據進行分析,輔以適當的補償算法,對機器人的誤差進行補償以達到減小誤差的目的。
由于激光加工機器人的精度要求很高,需要采用多種方法進行誤差綜合補償。首先采用“避免”誤差的方法。在機器人的結構設計中,采用合理的結構,使機器人的變形盡可能小。在加工制造過程中,關鍵的部件采用高精度的加工技術和裝配工藝。但是該方法對機器人經過運行,產生由于機械磨損、元件性能降低以及構件自身動態特性等因素帶來的誤差則無能為力。其次通過綜合補償技術來進一步提高機器人精度。即根據實際測量的機器人誤差,在機器人模型中引入恰當的補償算法,來減小機器人的誤差,實現改善和提高機器人精度的目的。
4。2 機器人誤差模型的建立
運動學模型的選擇是決定機器人絕對精度的重要因素之一。它必須正確地對影響機器人末端位姿的各種因素建模。增加運動學模型的復雜度有助于提高機器人的絕對精度,但是也要付出降低機器人性能中其它特性的代價,因此建模時要綜合考慮各方面的因素。
激光加工機器人為框架結構的機器人,我們認為采用網格化的誤差補償方法較合適,該方法可以補償機器人幾何誤差和某些非幾何誤差。
根據機器人補償精度的要求,可以把激光加工機器人工作空間劃分為網格如圖10所示。根據不同的補償精度的要求,網格的疏密程度可以不同。實際的網格劃分為14×11×9。
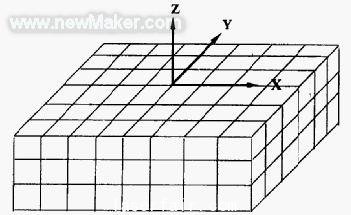
圖 10 機器人工作空間網格劃分圖
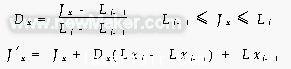
X方向的誤差補償公式
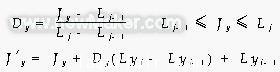
Y方向的誤差補償公式
Z方向的誤差補償公式

其中 Li、Lj、Lk 分別為 X方向、Y方向和 Z方向的網
格點 ,Lxi、Lyj、Lzk分別為 X方向、Y方向和 Z方向的
位置補償值 。
在機器人系統未補償前 ,機器人系統的最大誤差為 0.2mm,經過補償后的機器人誤差為 0.04mm,完全滿足機器人激光加工精度的要求 。
5 結論 ( Conclusion)
目前激光加工機器人完成調試 ,運行結果表明系統完全達到預期指標 。該機器人準備用于汽車大型模具的表面激光處理 ,現在正在進行激光加工處理工藝實驗 。不遠的將來即可達到實用化程度 ,投入實際使用 。
參考文獻 (References)
[1] Chia P Day. Robot Accuracy Issues and Methods of Improvement[A]. 19 th ISIR[C], Chicago:April,1989. 16 -26
[2] Bryan Greenway. Robotaccuracy[J]. Industrial Robot,2000,27( 4):257 - 265
[3] Joachim O Berg. Path and Orientation Accuracy of Industrial Robot[J]. Advanced Manufacturing Technology, 1993, 86 2-71
[4]劉振宇,陳英林,曲道奎,徐方。機器人標定技術研究 [J]。機器人 , 2001, 24( 5 ) :447 - 450
作者簡介 :
曲道奎 (1961-),男,研究員、博導。研究領域:機器人學,智能控制。
徐 方 (1962-),男,研究員。研究領域:機器人學,自動控制。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



























 關注我們
關注我們

