




前言
隨著科學技術的發展,大型重要構件的焊接越來越多,僅僅依靠手工焊接難于滿足焊接質量和焊接效率的要求,焊接自動化將成為焊接技術發展的必然趨勢。在此介紹新型爬行式弧焊機器人的焊接工藝問題,其目的是為了實現大型構件的全位置自動化焊接。
該系統對國內外現有的焊接設備和方法來說是全新的,所以在整個設計、完善和試驗過程中不可避免的遇到了很多問題和困難,在此就焊接試驗過程中所遇到的問題和采取的解決辦法做一說明。
1 爬行式弧焊機器人系統
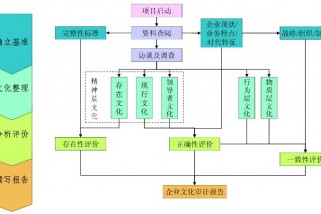
爬行式弧焊機器人系統的構成主要由永磁履帶爬行機構、激光圖像傳感系統、信息處理及跟蹤控制系統所組成,如圖1 所示。爬行機構是機器人的運動動力系統;圖像傳感與信息處理系統構成焊接識別系統,以識別焊縫,與跟蹤控制系統一起組成焊縫跟蹤系統,以實現運動中的焊縫跟蹤和焊接。
在十字滑塊的上滑塊上固定有螺絲可調節鋼臂,其平行于機器人車體,用以焊槍的對準調節。前端為擺動器,其上可夾持焊槍,用以完成焊接過程焊槍的擺動,參數可調。
為了保證焊接電流在試驗過程中穩定可靠,以使焊接試驗能夠較準確地反映該套系統用于焊縫跟蹤焊接的實際效果,焊接用電源和送絲機構選用芬蘭KEMPPI公司生產的 KEMPPI PR0500,它的焊接模式、焊接脈沖、電流、電壓等多項焊接參數均可隨時手動調整,在焊接過程中并能根據已有參數自動穩定焊接電流、電壓。
2 焊接工藝與試驗
采用該系統我們做了兩種位置的焊接試驗,分別為立焊和橫焊(大型構件主要的焊接位置分為立焊和橫焊,針對這兩種焊接位置來進行試驗研究。)在實際手工焊接的過程中!這兩種位置的焊接所采用的焊接方法有很大差異,工藝方法也就有很大不同。
2.1 試驗材料
為符合在工業生產中的造船、制罐等實際用材情況,選用普通碳鋼!焊絲選用直徑1.2MM 鍍膜焊絲。
2.1 焊接工藝
2.2.1 焊接方法
采用氬氣、co2混合氣體保護MIG 脈沖焊;背面使用陶瓷襯墊;單面焊雙面成形工藝&蓋面根據焊接位置為立焊一道、橫焊多道成形。
2.2.2 焊接坡口
a. 立焊。 坡口選用“V”型坡口,具體坡口形式及尺寸如圖2所示。焊前坡口及周圍20MM范圍內清除水、油、銹等,露出金屬光澤,以保證激光圖像傳感系統對焊縫的順利識別。
b. 橫焊。坡口選用不對稱"v"型坡口,具體坡口形式及尺寸如圖3 所示。焊前需處理坡口表面。
2.2.3 工藝規范
在試驗過程中,除對焊機參數的整定和正確調節外,焊槍位置、焊槍的擺動、焊接速度對焊接質量、焊縫成形都有很大的影響。因為這些量依靠手調、特別是焊槍位置、焊槍擺動,在實際操作中不便于測量,調節難度較大。
a. 焊槍位置包括焊槍頭與工件位置、焊絲與坡口位置(要考慮擺動幅度的影響,見圖2圖3)。
b. 焊槍擺動由調節擺動器來實現,主要參數有擺動速度%左中右3 個位置的停留時間。
c. 焊接速度um為焊前設定值,焊接過程中可調。
d.焊前對焊機電壓補嘗進行整定,整定值2.6V作為焊機內設參量。常用調節量有送絲速度us、焊接電壓U和脈沖幅值。
2.2.4 焊接各項參數
a. 立焊。
立焊打底時焊槍垂直于工件mm 左右上方,加擺后焊絲靠兩邊坡口1-2mm,如圖2所示。第二道蓋面,焊槍垂直上調5-8mm,擺動幅度適當調大。立焊時各參數如表1所示。
b. 橫焊。
橫焊打底時焊槍微向下扎,使焊絲在加有擺動時不至太靠下邊坡口,焊槍順焊接方向向下斜擺,大約與水平成75°—80°;蓋面三道成形,均不加擺動,且每次要根據上道次焊接的效果和位置從新調整焊槍姿態(見圖3)第一道蓋面槍頭略向下扎,二道時較平,末道槍頭略向上抑。橫焊時各參數如表2所示。
3 試驗結果
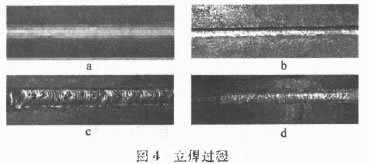
a. 在早期試驗中,電流、電壓值與焊速的匹配總不令人滿意。采用的MIG脈沖焊,其宜于用較小的平均電流進行焊接,特點是熔池體積小,不易淌流,且在脈沖峰值電流作用下,熔滴的軸向性好,故比起普通氬弧焊更有利于焊縫成形,在全位置焊中有很好的效果。試驗中早期打底焊焊速一般在8cm/min以上,相應電流值也較高,在95-105A之間,焊接過程不太穩定,背面成形有時也不理想。究其原因,在于脈沖幅值的影響,脈沖電流使熔滴呈噴射過渡,在較大脈沖電流下較小的電壓易造成大飛濺、淌流,而大電壓表面成形也不理想。我們在試驗中不斷摸索,后在穩定幅值的前提下適當減小電流、電壓并且降低焊速,這樣在橫向和垂直位置的焊接過程中,充分發揮出了脈沖焊工藝在全位置焊上的優點,焊接過程穩定,飛濺小,兩面成形都很理想。圖4a、圖4b、圖4c、圖4d 依次為立焊焊前加襯墊樣板、立焊背面成形、打底和蓋面成形樣例。
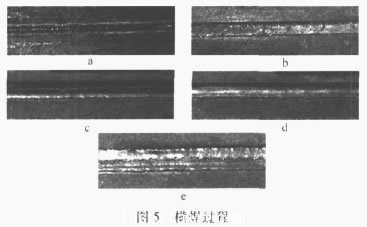
b. 手工焊蓋面橫焊工藝采用的是加擺停留的方法,由于人工操作的靈活性,焊接過程中擺動頻率、幅度和停留時間均可實時改變,故一般寬度的蓋面焊可一次成形。由于該機器人缺乏人的靈活性,我們通過模仿人工的蓋面過程橫焊,采用高焊速加快速擺動或不加擺動多道成形的橫焊蓋面方法。這樣就避免了橫焊蓋面淌流的發生,也取得了不錯的效果。圖5a、圖5b、圖5c、圖5d、圖5e 依次為橫焊背面成形、打底焊、蓋面第一道、第二道、最后蓋面成形。
c. 除了電流電壓和焊速,另一個人為影響較大的因素是擺動器的調節,根據不同位置的焊接要采用不同的擺動方式。
4 結論
試驗證明,通過對工藝方法的改進和調整,該套爬壁式弧焊機器人應用在立向和橫向焊接上,能夠獲得穩定的焊接質量和很好的表面成形。當針對不同的材質和焊縫規格時,要有某些值發生變化,則其他值相應也要有所調整。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



























 關注我們
關注我們

