






近來年,移動機器人技術在世界范圍內得到了大力發展,機器人的導航技術也隨之快速迭代發展,從之前的磁條導航、二維碼導航,到現在受歡迎的激光無軌導航。
對于不需要在地面鋪設磁條的激光無軌導航,又分成反射板導航式和自然輪廓導航式(無反射板)。
反射板導航式

反射板導航是在移動機器人行駛路線周圍的一定距離放置反射板,機器人身上的激光掃描儀發射激光束,然后采集反射回來的激光束。
根據反射回來的多個激光束數據確定機器人在環境中當前的位置,配合控制器,算法等來實現機器人的自主行走。
但在生產現場周邊放置反射板,一定程度上會影響現場作業進度,也給企業增加了不少實施成本。
自然輪廓導航式

所謂自然輪廓導航(無反射板),是基于SLAM的導航原理。SLAM(即同步定位與建圖)指在未知的環境中,機器人通過自身所攜帶的內部傳感器(編碼器、IMU等)和外部傳感器(激光傳感器或者視覺傳感器)來對自身進行定位,并在定位的基礎上利用外部傳感器獲取的環境信息增量式的構建環境地圖。
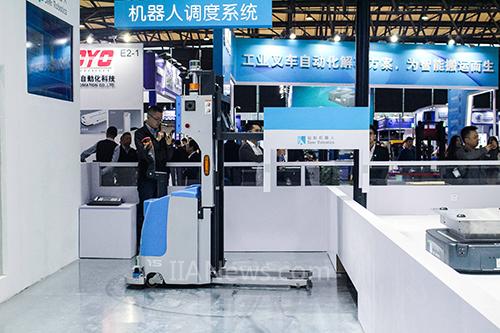
移動機器人領域內的高新技術企業——仙知機器人,自主研發的無反射板3D SLAM激光導航技術,地面無需其他定位設施,靈活方便,實現了機器人在復雜環境下的精準定位、快速部署。
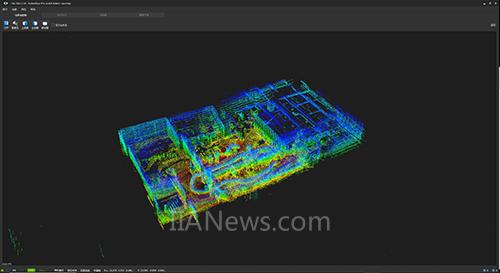
仙知3D SLAM激光導航技術,實現了機器人±5mm高精度定位
值得注意的是,仙知3D SLAM激光導航技術,加入了對場景語義的理解,使機器人具備了學習新環境的能力,即使場景再復雜,在短時間內,機器人也能靈活快速變更路徑。隨著應用端對場景智能化要求越來越高,無反射板3D SLAM激光導航方式越來越盛行了。
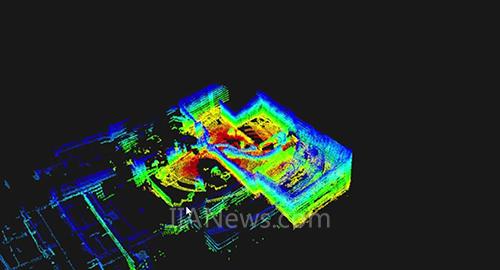
仙知在3D SLAM基礎上結合多傳感器,使機器人具備了學習新環境的能力
近年來,激光SLAM導航技術已取得了很大的發展,它將賦予機器人和智能制造行業強大的動力,真正推動中國制造業實現整體技術水平的提升。
對于不需要在地面鋪設磁條的激光無軌導航,又分成反射板導航式和自然輪廓導航式(無反射板)。
反射板導航式
反射板導航是在移動機器人行駛路線周圍的一定距離放置反射板,機器人身上的激光掃描儀發射激光束,然后采集反射回來的激光束。
根據反射回來的多個激光束數據確定機器人在環境中當前的位置,配合控制器,算法等來實現機器人的自主行走。
但在生產現場周邊放置反射板,一定程度上會影響現場作業進度,也給企業增加了不少實施成本。
自然輪廓導航式
所謂自然輪廓導航(無反射板),是基于SLAM的導航原理。SLAM(即同步定位與建圖)指在未知的環境中,機器人通過自身所攜帶的內部傳感器(編碼器、IMU等)和外部傳感器(激光傳感器或者視覺傳感器)來對自身進行定位,并在定位的基礎上利用外部傳感器獲取的環境信息增量式的構建環境地圖。
移動機器人領域內的高新技術企業——仙知機器人,自主研發的無反射板3D SLAM激光導航技術,地面無需其他定位設施,靈活方便,實現了機器人在復雜環境下的精準定位、快速部署。
仙知3D SLAM激光導航技術,實現了機器人±5mm高精度定位
值得注意的是,仙知3D SLAM激光導航技術,加入了對場景語義的理解,使機器人具備了學習新環境的能力,即使場景再復雜,在短時間內,機器人也能靈活快速變更路徑。隨著應用端對場景智能化要求越來越高,無反射板3D SLAM激光導航方式越來越盛行了。
仙知在3D SLAM基礎上結合多傳感器,使機器人具備了學習新環境的能力
近年來,激光SLAM導航技術已取得了很大的發展,它將賦予機器人和智能制造行業強大的動力,真正推動中國制造業實現整體技術水平的提升。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

